2.28 ヤコビアン
定義 2.115 (ヤコビアン)
座標変換
 に対して,
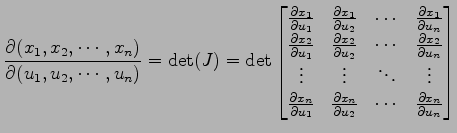
行列式
に対して,
行列式
をこの座標変換のヤコビアン(Jacobian) またはヤコビの行列式(Jacobi determinant)という.
 |
をこの座標変換のヤコビアン(Jacobian) またはヤコビの行列式(Jacobi determinant)という.
注意 2.116 (座標変換)
ヤコビアンが非零となるときのみ,
座標  ,
,  ,
,  と
座標
と
座標  , ,
, ,  とが 1 対 1 に対応する.
とが 1 対 1 に対応する.
平成21年1月14日